źļź═źĄź╣ż¼3nmźūźĒź╗ź╣ż╬ź»źļź▐├ō╚ŠŲ│öüż“│½╚»żĘż┐═²Įy
źļź═źĄź╣ź©źņź»ź╚źĒź╦ź»ź╣ż¼ŗī5└ż┬Õź»źļź▐├ō3nmźūźĒź╗ź╣ż╬SoCĪųR-Car X5HĪūźĘźĻĪ╝ź║Ī╩┐▐1Ī╦ż“╚»╔ĮżĘż┐ż¼Īóż│ż╬┴└żżż¼Ė½ż©żŲżŁż┐ĪŻż╩ż╝Ī󟻟ļź▐├ōż╩ż╬ż╦3nmźūźĒź╗ź╣ż¼ØŁ═ūż½ĪŻż╩ż╝ź▐źżź│ź¾żŪżŽż╩ż»SoCż½ĪŻż╩ż╝AIż¼ØŁ═ūż½ĪŻż╩ż╝ź┴ź├źūźņź├ź╚ż“╗╚ż”ż╬ż½ĪŻż╩ż╝źŽźżź©ź¾ź╔×æēäż½żķ│½╚»ż╣żļż╬ż½ĪŻ▐kż─ż╬┼·ż©ż¼Īó▐kż─ż╬Ė└±äżŪĮĖ╠¾żĄżņżļĪŻżĮżņżŽ▓┐ż½ĪŻ
┐▐1ĪĪ│╚─ź└Łż“─_£åĪóSD-Vżžż╬·t│½ż“┐▐żļ3nmźūźĒź╗ź╣ż╬R-Car X5HĪĪĮąųZĪ¦źļź═źĄź╣ź©źņź»ź╚źĒź╦ź»ź╣
±Tébż“Ė└ż¬ż”ĪŻĮĖ╠¾żĄżņżļ▐kż─ż╬Ė└±äżŽSD-VĪ╩źĮźšź╚ź”ź©źó─Ļ▒Iż╬ź»źļź▐Ī╦żŪżóżļĪŻTeslaż¼Ė└żżĮążĘż┐SD-Vż╬┤╦▄▄ćŪ░żŽĪ󟻟ļź▐ż╚żżż”15ŃQ┤ų░▌Ęeż╣żļż╚żżż”╣Ōēä䮿“╩▌ż┴ż╩ż¼żķĪó┐ʿʿżĄĪē”ż“źĮźšź╚ź”ź©źóżŪ╝{▓├żĘĪ󟻟ļź▐ż“į~├▒ż╦ź░źņĪ╝ź╔źóź├źūżĘżĶż”ż╚żżż”żŌż╬ĪŻź»źļź▐ż╬źŽĪ╝ź╔ź”ź©źó╦▄öüżŽ15ŃQ░╩æų╩čż©żķżņż╩żżż┐żßĪó┼ļ║▄żĄżņżļĄĪē”żŌ15ŃQĘąż├żŲżŌ╩čż’żķż╩żżĪŻż│żņżŪżŽ15ŃQĘąż─ż╚Ė┼ĮŁżżĄĪē”ż└ż▒ż¼╗─żļĪŻż│ż╬╣═ż©ż“╩čż©żŲĪóźĮźšź╚ź”ź©źóżŪź»źļź▐ż╬ĄĪē”ż“źóź├źūźŪĪ╝ź╚żĘżŲżżż│ż”Īóż╚żżż”Ślż└ĪŻżŪżŽż╔ż”żõż├żŲĪ®
ź»źļź▐ŠÅČ╚Īó╚ŠŲ│öüŠÅČ╚ĪóźĮźšź╚ź”ź©źóŠÅČ╚ż¼SD-Vż“▓┐ż½żķ╗Žżßżļż╬ż½ĪŻĘQČ╚─cż¼żĮżņżŠżņ╠ż═Ķż╬ź»źļź▐ż“╠Ž║„żĘ╗Žżßż┐ĪŻżĮż╬┼·ż©ż¼Š»żĘż║ż─Ė½ż©ż─ż─żóżļĪŻż│ż│żŪżŽ╚ŠŲ│öü░╩│░ż╬ŠÅČ╚ż╦ż─żżżŲżŽ┐©żņż╩żżż¼Īó╚ŠŲ│öüŠÅČ╚ż╬źļź═źĄź╣ż¼└ĶŲ¼ż“└┌ż├żŲżĮż╬▓“»é░Ųż“Ė½ĮążĘż┐ĪŻżĮżņż¼╝┬żŽĪųR-Car X5HĪūżŪżóżļĪŻ
║Żżõź│ź¾źįźÕĪ╝ź┐żĮż╬żŌż╬ż¼╚ŠŲ│öüż╬źĒźĖź├ź»ż╚źßźŌźĻż╩ż╔żŪĮą═ĶżŲżżżļĪŻź│ź¾źįźÕĪ╝ź┐Īß╚ŠŲ│öüż╚╣═ż©żŲżŌ║╣żĘܦż©ż╩żżĪŻż█ż╚ż¾ż╔ż╬╚ŠŲ│öüĄĪē”ż¼ź│ź¾źįźÕĪ╝ź┐ż╚±Tżėż─żżżŲżżżļż½żķż└ĪŻź»źļź▐ż╬źĒĪ╝ź½źļź│ź¾źįźÕĪ╝ź┐żŪżóżļECUĪ╩┼┼╗ęöUĖµźµź╦ź├ź╚Ī╦żŽ╣ŌĄķ┘ZżŪ80Ī┴100Ė─ĪóĮjś¬┘ZżŪżĄż©20Ī┴40Ė─µć┼┘┼ļ║▄żĄżņżŲżżżļż¼Īó═ŠżĻż╬¾HżĄż╦ź’źżźõĪ╝źŽĪ╝ź═ź╣żŌ╗\ż©─_╬╠żŽ╗\ż╣▐köĄż└ż├ż┐ĪŻż│ż╬ż┐żß╩Ż┐¶ż╬ECUż“1±śż╦ż▐ż╚żßżĶż”ż╚żżż”źŠĪ╝ź¾źóĪ╝źŁźŲź»ź┴źŃż¼▓żä▌ż“├µ┐┤ż╦örż¾ż╦ż╩ż├żŲżŁż┐ĪŻżĄżķż╦╩Ż┐¶ż╬ECUż“╠Jż═ż┐┼²│ńECUĪ╩źŠĪ╝ź¾ź│ź¾źįźÕĪ╝ź┐Ī╦ż“▐kż─ż╦ż▐ż╚żßżļ├µ▒¹ź│ź¾źįźÕĪ╝ź┐ż╚ź╗źŁźÕźĻźŲźŻ└ņ├ōź│ź¾źįźÕĪ╝ź┐ż¼─║┼└ż╦żóżļż╚żżż”╣Į└«ż╦ż╩żļĪŻ
żĘż½żŌ╩Ż┐¶±śż╬ECUż“ż▐ż╚żßżŲ1±śż╦ż╣żļż│ż╚żŽż▐żĄż╦▓Š„[▓ĮżĮż╬żŌż╬żŪżóżļĪŻż─ż▐żĻ┼²│ńECUżŽ▓Š„[▓Įź│ź¾źįźÕĪ╝ź┐żŪżóżĻĪóżĮżņżķż“żĄżķż╦╠Jż═żļ├µ▒¹ź│ź¾źįźÕĪ╝ź┐żŌ▓Š„[▓ĮżĄżņżļż│ż╚ż╦ż╩żļĪŻ
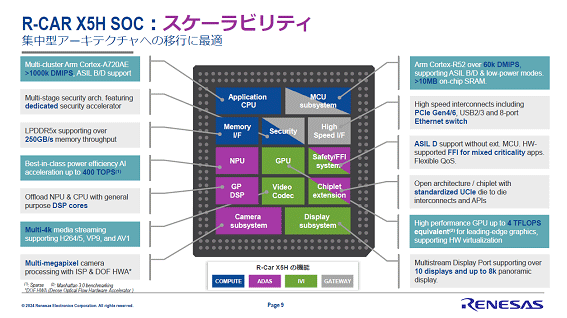
źļź═źĄź╣ż╬┐Ę×æē俎Īó▓Š„[▓Įź│ź¾źįźÕĪ╝ź┐żŪżóżļĪŻż│ż╬ż┐żßżĮż╬ĄĪē”żŽĪóź▐źļź┴ź│źóCPUżõGPUĪ╩ź░źķźšźŻź├ź»źūźĒź╗ź├źĄĪ╦ĪóISPĪ╩▓ĶćĄ┐«ęÄĮĶ═²źūźĒź╗ź├źĄĪ╦ĪóNPUĪ╩AI├ōź╦źÕĪ╝źķźļźūźĒź╗ź├źĄĪ╦Īóź│Ī╝źŪź├ź»Ī╩▓ĶćĄ░ĄĮ╠Ī”äP─╣źūźĒź╗ź├źĄĪ╦Īó╝■╩šIOźżź¾ź┐Ī╝źšź¦źżź╣ż╩ż╔ĪóżŲż¾ż│örżĻż╬SoCż╚ż╩żļĪŻ¾H┐¶ż╬ĄĪē”ż“Ęeż┐ż╗żŲż¬ż»ż╚żżż”ż│ż╚żŽĪóĮĖ└č┼┘żŽż½ż╩żĻ╣Ōżżż│ż╚ż“┴T╠ŻżĘĪóźļź═źĄź╣ż╦żĶżļż╚┐¶╝å▓»ź╚źķź¾źĖź╣ź┐ż╦ż╩żļĪŻ╣ń═²┼¬ż╩ĀC└čż╦ż│żņż└ż▒ż╬ź╚źķź¾źĖź╣ź┐ż“ĮĖ└čż╣żļż┐żßż╦3nmźūźĒź╗ź╣ż¼ØŁ═ūż╚ż╩żļĪŻ
ż│żņż└ż▒¾Hż»ż╬ź╚źķź¾źĖź╣ź┐ż“ĮĖ└迥ż╗żŲżŌĪóĮjś¬┘Zż½żķ╣ŌĄķ┘Zż▐żŪ1ż─ż╬ECUżŪź½źąĪ╝żŪżŁż╩żżż┐żßĪó│╚─ź└ŁĪ╩ź╣ź▒Ī╝źķźėźĻźŲźŻĪ╦ż“Ęeż┐ż╗żŲµ£┘Z¹|ż╦×┤▒■żĘżŲżżż»ż│ż╚ż╦ż╩żļĪŻż│ż╬ż┐żßĪó║Żöv╚»╔ĮżĘż┐ĪųR-Car X5HĪūżŽĪóĮjś¬┘Zż╦Ė■ż▒żŲ▓╝öĄ·t│½żĘżŲżżż»ż│ż╚ż╦ż╩żļĪ╩┐▐2Ī╦ĪŻżĮżņżŌ═┐ż©żļż┘żŁĄĪē”żŽ╣ŌĄķ┘ZżŪµ£żŲż“ź½źąĪ╝ż╣żļż┐żßĪóźĮźšź╚ź”ź©źóż╬║ŲŠW├ōĪóövŽ®æųż╬IPż╬║ŲŠW├ōż╩ż╔ż¼ØŁ┐▄ż╚ż╩żļĪŻ
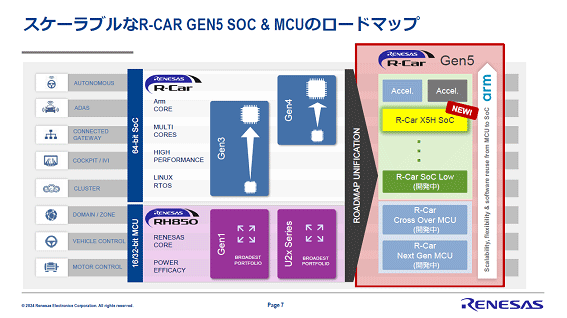
┐▐2ĪĪ┘Z║▄Ė■ż▒SoCżŽźŽźżź©ź¾ź╔ż½żķź▀ź├ź╔źņź¾źĖĪóźĒĪ╝ź©ź¾ź╔żžż╚▓╝öĄ·t│½żĘżŲżżż»ĪĪĮąųZĪ¦źļź═źĄź╣ź©źņź»ź╚źĒź╦ź»ź╣
SD-VżŪżŽ▓Š„[▓ĮČ\Įčż“╗╚żżĪóźĮźšź╚ź”ź©źóż“żżż─żŪżŌśŗ┐ĘżŪżŁżļżĶż”ż╦ż╩żļĪŻżĮż│żŪĪóźŽĪ╝ź╔ź”ź©źóżŌśŗ┐ĘżŪżŁżļżĶż”ż╦żĘż┐żżĪŻżĮż╬▓“ż¼│╚─ź└ŁżŪżóżļĪŻźŽźżź©ź¾ź╔ż╬żŲż¾ż│örżĻż╬SoCż╦żĄżķż╦ĄĪē”ż“╝{▓├żĘż┐żżż╚żżż”═ūĄßż¼ż»żļŠņ╣ńż╦żŽź┴ź├źūźņź├ź╚żŪ×┤▒■ż╣żļĪóż╚żżż”Ślż└ĪŻźļź═źĄź╣żŽź┴ź├źūźņź├ź╚ż╬źżź¾ź┐Ī╝źšź¦źżź╣ż╬║YØŹæä│╩ź│ź¾źĮĪ╝źĘźóźÓż╬UCIeż╬źßź¾źąĪ╝żŪżŌżóżļĪŻź┴ź├źūźņź├ź╚ż╦żŽ└čČ╦┼¬ż╦UCIeØŹĄ“żĄżņż┐×æēäż“╗╚ż├żŲżżż»ż│ż╚żŪ┴Ū┴ßż»│╚─ź└Łż╦żŌ×┤▒■żĘżŲżżż»ĪŻźĮźšź╚ź”ź©źóżŪż╬śŗ┐Ęż╩żķOTAĪ╩Over the AirĪ╦żŪżŌ▓─ē”ż└ż¼Īóź┴ź├źūż╬śŗ┐Ęż╦żŽźįź¾Ė▀┤╣└Łż¼─_═ūż╦ż╩żļĪŻ
źļź═źĄź╣żŽĪó║Żövż│ż╬Č\Įčź│ź¾ź╗źūź╚ż“Šę▓żĘ▒■├ōĄ£╬Ńż“Ė½ż╗ż┐ĪŻ▐kż─żŽĪó╩Ż┐¶ż╬ź½źßźķżõźņĪ╝ź└Ī╝ż½żķż╬źŪĪ╝ź┐żõźĄźķź”ź¾ź╔źėźÕĪ╝źŌź╦ź┐Ī╝źŪĪ╝ź┐ż╩ż╔ż“═╗╣ńż╣żļźšźÕĪ╝źĖźńź¾┼²│ńECUż“ADASĪ╩└Ķ┐╩ż╔żķĪ╝żąÜ¦▐qźĘź╣źŲźÓĪ╦żõIVIĪ╩┘ZŲŌźżź¾źšź®źŲźżź¾źßź¾ź╚Ī╦Īóź▓Ī╝ź╚ź”ź¦źżż╩ż╔żžż╬▒■├ōż└Ī╩┐▐3Ī╦ĪŻżŌż”▐kż─żŽĪóż│żņżķż╬źšźÕĪ╝źĖźńź¾ż╦LiDARĪ╩Light Detection and RangingĪ╦żõĄ¹┤Ńźņź¾ź║ż╦żĶżļ▓ĶćĄT┘ćźŪĪ╝ź┐żŌ┤▐żßż┐╣Ō┼┘ż╬═╗╣ń┼²│ńECUĪŻżĄżķż╦╩Ż┐¶ż╬źŪźŻź╣źūźņźżĮą╬üżŌ┼²╣ńżĘż┐ź│ź├ź»źįź├ź╚ż╬ź╔źßźżź¾ECUżŌĄ£╬Ńż╚żĘżŲĄ¾ż▓żŲżżżļĪŻ
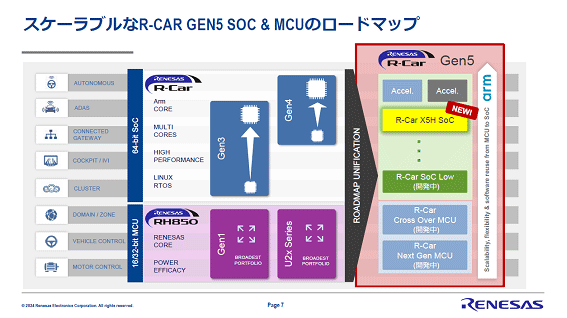
┐▐3ĪĪR-CAR X5Hż╬źµĪ╝ź╣ź▒Ī╝ź╣ĪĪĮąųZĪ¦źļź═źĄź╣ź©źņź»ź╚źĒź╦ź»ź╣
ĪųR-Car X5HĪūż╦żŽĪóźóźūźĻż╬ĮĶ═²├ōż╦1000k DMIPSż╬Arm Cortex-A720AEż“32ź│źóżõĪóźĻźóźļź┐źżźÓĮĶ═²├ōż╬60k DMIPSż╬Cortex-R52ż“6ź│źóĮĖ└čżĘżŲżżżļż█ż½Īó║ŪĮj400TOPSż╬AIźūźĒź╗ź├źĄżõĪó║ŪĮj 4TFLOPSż╬ GPUż╩ż╔ż“ĮĖ└čżĘżŲżżżļĪŻ2025ŃQæų┤³ż╦Ė┬─ĻźĄź¾źūźļż“Įą▓┘Īó2027ŃQ▓╝┤³ż╦╬╠ŠÅ│½╗Žż╬═Į─Ļż╚ż╩ż├żŲżżżļĪŻ