źŪźÕźóźļDSPź│źóż“ĮĖ└čĪóźėźĖźńź¾źĘź╣źŲźÓż╦ØŖ▓ĮżĘż┐▓ĶćĄĮĶ═²źūźĒź╗ź├źĄ
źŪźÕźóźļź│źóDSPż“ź┘Ī╝ź╣ż╦żĘżŲĪóźėźĖźńź¾źĘź╣źŲźÓż╦ØŖ▓ĮżĘż┐PVPĪ╩Pipelined vision processorĪ╦źūźĒź╗ź├źĄż“źóź╩źĒź░Ī”źŪźąźżź╗ź║╝ęż¼×æēä▓ĮżĘż┐ĪŻż│żņż▐żŪż╬FPGAżõźŽźżź©ź¾ź╔DSPżŽ╣Ō╗@┼┘Ī”╣ŌÅ]ż╬▓ĶćĄĮĶ═²żŽżŪżŁżļż¼ź│ź╣ź╚ż¼╣ŌżżĪŻźėźĖźńź¾źĘź╣źŲźÓż╦ØŖ▓ĮżĄż╗ż┐źūźĒź╗ź├źĄżŽ─Ńź│ź╣ź╚żŪĪó─ŃŠ├õJ┼┼╬üż╬źĘź╣źŲźÓż¼▓─ē”ż╦ż╩żļĪŻ
┐▐1ĪĪź»źĒź╣źąĪ╝ź╣źżź├ź┴ż“ĮĖ└čĪóźąź╣ż“└┌żĻü÷ż©żļĪĪĮąųZĪ¦Analog Devices Inc.
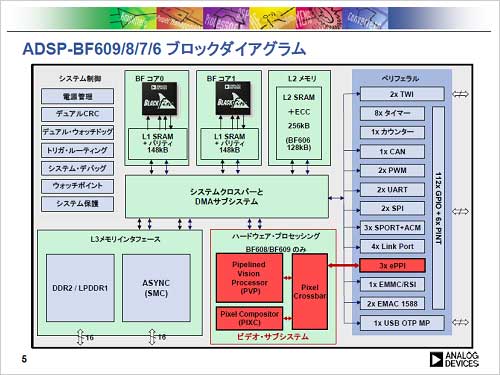
źóź╩źĒź░Ī”źŪźąźżź╗ź║╝ęż¼║Żöv─¾░ŲżĘż┐PVPźūźĒź╗ź├źĄBF608ż╚BF609żŽĪóźŪźÕźóźļź│źóż╬╔w─ĻŠ«┐¶┼└DSPĪóBlackfinż“źėźĖźńź¾▓“└ŽĖ■ż▒ż╦║Ū┼¼▓ĮżĘż┐PVPźūźĒź╗ź├źĄż“ĮĖ└čżĘĪó╣Ł┬ė░Ķż╬źŪĪ╝ź┐ż“ź»źĒź╣źąĪ╝ź╣źżź├ź┴żŪ└┌żĻü÷ż©żļźąź╣Ī”źóĪ╝źŁźŲź»ź┴źŃż“ŲDżĻ╣■ż¾żŪżżżļĪ╩┐▐1Ī╦ĪŻ▓Ķ楟ŪĪ╝ź┐ż“Įj(lu©░)╬╠ż╦ĮĶ═²ż╣żļż┐żßĪó148Kźąźżź╚ż╬L1źŁźŃź├źĘźÕż“ĘQBlackfinź│źóż╦└▀ż▒ĪóL2źŁźŃź├źĘźÕż“Č”Ń~źßźŌźĻż╚żĘżŲ╗╚żżĪ󿥿ķż╦L3źßźŌźĻźżź¾ź┐Ī╝źšź¦Ī╝ź╣żŌ×óż©Īó│░ŗż╚żŽDDR2źßźŌźĻż“─╠żĘ16źėź├ź╚╔²żŪżõżĻŲDżĻż╣żļĪŻ
▓ĶćĄĮĶ═²ż╬źŽĪ╝ź╔ź”ź©źóźūźĒź╗ź├źĘź¾ź░ż“╣įż”PVPźūźĒź╗ź├źĄŗ╩¼żŪżŽĪóźūźĒź╗ź├źĄż╬┬Šż╦Blackfinź│źóż╬źŪĪ╝ź┐ż╚Īó3x ePPIźżź¾ź┐Ī╝źšź¦Ī╝ź╣ż“─╠żĖżŲCMOSź╗ź¾źĄżõLCDźŪźŻź╣źūźņźżż½żķż╬źŪĪ╝ź┐ż“┤╔═²ż╣żļźįź»ź╗źļź»źĒź╣źąĪ╝övŽ®ż╚Īó┐¦ż“öU(ku©░)Ėµż╣żļ”┴źųźņź¾źŪźŻź¾ź░ż╬źįź»ź╗źļź│ź¾źąĪ╝ź┐żŪżóżļźįź»ź╗źļź│ź¾ź▌źĖź├ź┐Ī╩PIXCĪ╦ż½żķż╩żļĪŻ
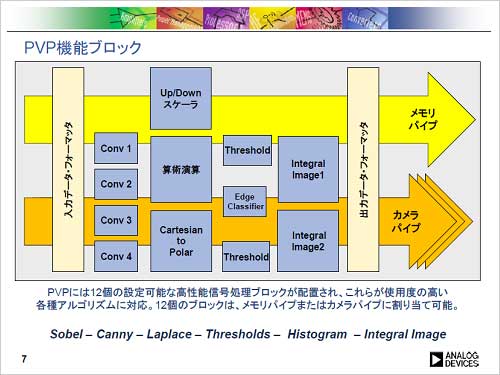
┐▐2ĪĪPVPźūźĒź╗ź├źĄż╬övŽ®źųźĒź├ź»ĪĪĮąųZĪ¦Analog Devices Inc.
ż│ż╬źūźĒź╗ź├źĄżŽĪóśOŲ░┘ZżŪ┴÷╣įżĘżŲżżżļ╗■ż╦ØiöĄ(sh©┤)żŪŲ░ż»Ø±öüż“╝▒╩╠ĪóĖĪĮąĪó╝{└ūż╣żļĄĪē”ż“╝┬ĖĮż╣żļż┐żßĪó┐▐2ż╬żĶż”ż╩źųźĒź├ź»╣Į└«ż╦ż╩ż├żŲżżżļĪŻŲ■╬üźŪĪ╝ź┐żŽĘ┴╝░ż“╣ńż’ż╗ż┐ĖÕĪó4╦▄ż╬ź│ź¾ź▄źļĪ╝źĘźńź¾(øQż▀╣■ż▀)▒ķōQövŽ®ż╦Ų▒╗■ż╦Ų■żżżļĪŻź│ź¾ź▄źļĪ╝źĘźńź¾żŽĪóŲ¾ż─ż╬┤ž┐¶ż“╩┐╣įöĪŲ░żĘż╩ż¼żķ─_ż═╣ńż’ż╗żļ▒ķōQżŪżóżļĪŻśOŲ░┘Zż╬ÄXż½żķĖ½ż©żļźĘĪ╝ź¾żŪżŽĪóŲ░ż»Ø±öüż¼Ų░ż½ż╩żżØ±öüż╚─_ż╩żĻ╣ńż├żŲżżżļĪŻżĮżņżķż“╝▒╩╠ż╣żļŠņ╣ńż╦ź│ź¾ź▄źļĪ╝źĘźńź¾▒ķōQż╦żĶżĻ├ĻĮąż╣żļĪŻżĄżķż╦Sobel▒ķōQż╦żĶż├żŲرöüż╬ź©ź├źĖż“├ĻĮążĘĪóźŪĪ╝ź┐ż“Ę┌ż»żĘż╩ż¼żķرöüż“Ū¦╝▒ż╣żļĪŻśOŲ░┘Zż╬▒┐┼Š±śż½żķ│░ż╬źĘĪ╝ź¾ż“Ė½żļż╚▒¾ŖZ╦ĪżŪ│©ż“ķWż»żĶż”ż╩Ę╩┐¦ż╦Ė½ż©żļż¼Īóż│żņż“╔ĮĖĮż╣żļż┐żßźŪź½źļź╚║┬║YĪ╩X,Y║┬║YĪ╦ż½żķČ╦║┬║Yżžż╬╩č┤╣ż“╣įż”(┐▐3)ĪŻ1┼└ż½żķ▒¾ż»żž╣Łż¼ż├żŲżżż»╔„Ę╩ż“╔Įż╣ĪŻżĄżķż╦▓Ķ楿╬ź©ź├źĖż“╩¼╬Óż╣żļPECĪ╩pixel edge classifierĪ╦ż╦ź©ź├źĖź▐ź├źūż“ź╣ź╚źóż╣żļĪŻź©ź├źĖż“╝{└ūżĘĪó─Š└■żõ▀ģĘ┴ż“ĖĪĮąĪ”╩č┤╣ż╣żļĪŻ║ŪĖÕż╦╩¼╬ӿʿŲŲ■╬üźŪĪ╝ź┐źšź®Ī╝ź▐ź├ź╚żžźŪĪ╝ź┐ż“źšźŻĪ╝ź╔źąź├ź»ż╣żļĪŻ
┐▐3ĪĪź»źļź▐ż╬źšźĒź¾ź╚ÄXż½żķØiöĄ(sh©┤)ż“Ė½żļż╚1┼└ż╦╝²╠Jż╣żļżĶż”ż╦Ė½ż©żļĪĪĮąųZĪ¦Analog Devices Inc.
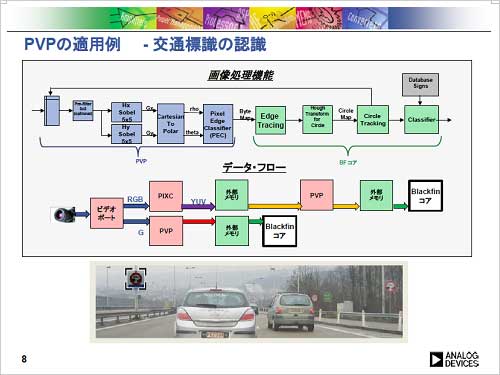
ż│ż”żżż├ż┐▐kŽóż╬Ų░║Ņż“└ņ├ōż╬źŽĪ╝ź╔ź”ź©źóźūźĒź╗ź├źĄżŪ╣įż”ż│ż╚żŪ╣ŌÅ]ĮĶ═²ż╣żļż│ż╚ż¼żŪżŁżļĪŻ└@├ōż╬DSPżõFPGAż╬żĶż”ż╦źĮźšź╚ź”ź©źóż└ż▒żŪ╣įż”ż╚╠ĄŠGż╩övŽ®ōļ░Ķż¼╚»Ö┌ż╣żļż┐żßĪóŠ├õJ┼┼╬üż¼╣Ōż»ż╩ż├żŲżĘż▐ż”ĪŻż│ż╬┐ĘĘ┐ż╬BF609żŽ25ĪŅż╬║YØŹŲ░║ŅżŪ400mWż╚Š»ż╩żżĪŻźŪźÕźóźļź│źóBlackfinż╬ĘQź│źóż╬Ų░║Ņ╝■āS┐¶ż“500MHzż╚Ī󿥿█ż╔╣Ōż»ż╗ż║ż╦╝ŖōQżĘżŲżżżļż½żķżŪżóżļĪŻ
ź»źĒź├ź»╝■āS┐¶ż“æųż▓ż║ż╦╝ŖōQÅ]┼┘ż“æųż▓żļż┐żßĪóźßźŌźĻż╚ź½źßźķż½żķż╬źŪĪ╝ź┐ż“╩┬š`ĮĶ═²ż╣żļźčźżźūźķźżź¾╣Įļ]ż“║╬ż├żŲżżżļĪŻż│żņż╦żĶżĻĪó║ŪĮj(lu©░)5ż─ż╬źėźĖźńź¾Ī”źóźļź┤źĻź║źÓż“Ų▒╗■ż╦╝┬╣įżĄż╗żļż│ż╚ż¼żŪżŁżļĪŻź½źßźķż╬▓“ćĄ┼┘żŽ║ŪĮj(lu©░)HDĪ╩1280Ī▀960Ī╦ż▐żŪ░Ęż©żļĪŻĮĶ═²▓─ē”ż╩źšźņĪ╝źÓźņĪ╝ź╚żŽ30fpsĪŻź»źļź▐├ōż╬└Ķ┐╩▒┐┼ŠÜ¦▐qźĘź╣źŲźÓż╦╗╚ż©żļżĶż”ż╦ż╣żļż┐żßĪóča(b©│)┼┘šJ(r©©n)░ŽżŽ-40ĪŅĪ┴+105ĪŅż╚╣ŁżżĪŻ▓├ż©żŲĪ󟻟ļź▐├ōż╬ĄĪē”ŖWµ£æä│╩ISO26262ż╦ØŹĄ“żĘżŲżżżļĪŻ
└Ķ┐╩▒┐┼ŠÜ¦▐qźĘź╣źŲźÓżŪżŽĪóØiöĄ(sh©┤)ż╬ź»źļź▐ż╚ż╬ŠūŲ═ż“övķcĪó╩Ō╣įŪvż“ĖĪē¶(m©©ng)Ī󟎟żźėĪ╝źÓż“śOŲ░öU(ku©░)ĖµĪóĖ“─╠║Y╝▒ż“Ū¦╝▒ĪóŪ“└■ĖĪĮąĪ”┘Z└■▀`├”Ę┘╩¾ż╩ż╔ż╬ĄĪē”ż¼żóżļĪŻ║Żövż╬ź┴ź├źūżŽĪóż│ż”żżż├ż┐ĄĪē”ż“Ų▒╗■ż╦╝┬╣įż╣żļĪŻ
ż│ż╬ź┴ź├źūż╦żŽ╩┬š`ĮĶ═²ż╣żļż┐żßż╬źßźŌźĻōļ░Ķż¼¾HżżĪŻż│ż╬ż┐żßĪóźčźĻźŲźŻź┴ź¦ź├ź»żõECCĪ╩ĖĒżĻĖĪĮąÖÄ┘ćĪ╦övŽ®żŌĮĖ└čżĘĪóź©źķĪ╝ĖĪē¶(m©©ng)ż╚╔³Ąó├ōż╬źĘź╣źŲźÓ╩▌ĖŅźµź╦ź├ź╚ż“Į╝╝┬żĄż╗żŲżżżļĪŻ
▓ĶćĄŪ¦╝▒ż╬ĮĶ═²Å]┼┘ż“żĄżķż╦æųż▓ż┐żżżĶż”ż╩├ō²ŗżŪżŽĪóBF609ż“╩┬š`Ų░║ŅżĄż╗żļĪŻż│ż╬ż┐żßż╬╣ŌÅ]ź▐źļź┴źūźĒź╗ź├źĘź¾ź░├ōLink Portż“?y©żn)óż©żŲżżżļĪ?╦▄ż╬Link Portż└ż▒żŪżŽż╩ż»Īóż│ż╬ź┴ź├źūżŽ┐▐1ż╬żĶż”ż╦╝■╩šźżź¾ź┐Ī╝źšź¦Ī╝ź╣ż“¾H┐¶├ō┴TżĘżŲżżżļĪŻ
żŌż┴żĒż¾Īó╣ŌÅ]ż╬ĮĶ═²Å]┼┘ż“żĮżņż█ż╔äė(d©░ng)ż»═ūĄßżĄżņż╩żżŠÅČ╚├ōż╬▓ĶćĄĮĶ═²żŪżŌ╗╚ż©żļĪŻ╬Ńż©żąĪóżĘż’żõĄōĀaż╬żóżļźąĪ╝ź│Ī╝ź╔żõ╚┐╝o(j©¼)żĘżõż╣żżźčź├ź▒Ī╝źĖż╦Ų■ż├ż┐żŌż╬Īó╔į£½╝yż╩ź│Ī╝ź╔ż╩ż╔żŌŲ╔żßżļżĶż”ż╦żŪżŁżļĪŻ2╝ĪĖĄż╬ź│Ī╝ź╔Ī╩QRź│Ī╝ź╔Ī╦ż╦▒°żņżõŽ─ż▀Īó’łżŁż╩ż╔ż¼żóż├żŲżŌ─┤┼DżĘŲ╔ż▀ż╚żļż│ż╚ż¼żŪżŁżļĪŻź╗źŁźÕźĻźŲźŻź½źßźķż╬▓ĶćĄĮĶ═²żŪżŌCMOSźżźßĪ╝źĖź╗ź¾źĄż½żķż╬▓Ķ楿╚┐»Ų■ŪvĪ╩Ų░ż»Ø±öüĪ╦ż“Ė½╩¼ż▒żļż│ż╚ż¼żŪżŁżļĪŻ├¾┘ZŠņż╦ź½źßźķż“└▀Åøż╣żņżąŲ■ĮąŚU┘Zż╬┐¶ż“┤╔═²żĘĪóź╩ź¾źąĪ╝źūźņĪ╝ź╚żŌ│╬Ū¦żŪżŁżļĪŻ
BF60xźĘźĻĪ╝ź║ż╬äh▓┴ź▄Ī╝ź╔ż╚źĮźšź╚ź”ź©źó│½╚»ź─Ī╝źļżŌ─¾ČĪż╣żļĪŻź¬Ī╝źūź¾źĮĪ╝ź╣ż╬Eclipseź┘Ī╝ź╣żŪ╣Į├█żĘż┐CrossCore┼²╣ń│½╚»┤─ČŁżŪżŽĪóGUIż╦żĶż├żŲź│Ī╝ź╔ż“Ö┌└«żŪżŁĪóźĘź▀źÕźņĪ╝źĘźńź¾źŌźŪźļżŌ┤▐ż▐żņżŲżżżļĪŻżŌż┴żĒż¾źŪźąź├ź░ź─Ī╝źļżŌ┤▐żÓĪŻ
┐▐4ĪĪ┼²╣ń│½╚»ź─Ī╝źļżŌ├ō┴TĪĪĮąųZĪ¦Analog Devices Inc.