Infineonż╬┤░µ£śOŲ░▓Į200mmźķźżź¾ż╚źčź’Ī╝╚ŠŲ│öü├ō300mmźķźżź¾ż“Ė½ż┐
ź╔źżź─ż╬Infineon TechnologiesżŽĪóźčź’Ī╝╚ŠŲ│öüĖ■ż▒ż╦300mmź”ź¦Ī╝źŽźķźżź¾ż“ź╔źņź╣źŪź¾ż╦└▀ÅøżĘ╔nŲ»żĄż╗żŲżżżļĪŻźčź’Ī╝╚ŠŲ│öüżŽ┐¶╬╠ż╬┼└żŪżŽźŪźĖź┐źļżõźóź╩źĒź░×æēäż╦╬¶żļż¼ĪóżĮż╬ź┴ź├źūż“Įj(lu©░)Ė²Ę┬▓Įż╣żļźßźĻź├ź╚żŽżõżŽżĻ─Ńź│ź╣ź╚▓Įż╦żóżļĪŻ▓├ż©żŲĪó┐═°PõJż╬╣Ōżżź╔źżź─żŪżŌź│ź╣ź╚┼¬ż╦Ė½╣ńż”Ö┌ŠÅż“ż╣żļż┐żß200mmźķźżź¾ż“┤░µ£śOŲ░▓ĮżĘż┐ĪŻ

┐▐1ĪĪ Infineonż╬ź╔źņź╣źŪź¾╣®ŠņĪĪ║Ėż╬Ę·Ø±ż¼300mmĪóīÜż╬Ų¾ż─ż╚żĮż╬╚Š╩¼ż╬Įj(lu©░)żŁżĄż╬Ę·Ø±ż¼200mmźķźżź¾ĪĪĮąųZĪ¦Infineon Technologies
Infineonż╬╬╠ŠÅźķźżź¾ż¼żóżļź╔źņź╣źŪź¾żŽĪ󟬟┌źķźŽź”ź╣żõ╬“╗╦┼¬ż╩Ę·ļ]رż╬¾HżżĖ┼żżÅžż└ż¼Ī󟎟żźŲź»╩¼╠ŅżŪżŽźĘźĻź│ź¾źČź»źĮź╦Ī╝ż╚Ō}żążņżŲżżżļĪŻĄņ┼ņź╔źżź─ż╦ō’żĘżŲżżż┐ź╔źņź╣źŪź¾żŽźČź»ź╗ź¾├ŽöĄ(sh©┤)ż╦żóżļż┐żßż└ĪŻż│ż│ż╦żŽ╚ŠŲ│öüźšźĪź”ź¾ź╔źĻż╬GobalFoundriesż¼żóżĻĪó×æļ]äóÅøĪó×æļ]ż╦ØŁ═ūż╩ź¼ź╣×æļ]ż╩ż╔ż╬ŠÅČ╚żŌ┬Ęż├żŲżżżļż½żķżŪżŌżóżļĪŻ
InfineonżŽż│ż╬ź╔źņź╣źŪź¾╣®Šņż╦20ŃQ┤ųżŪ30▓»źµĪ╝źĒż“┼Ļ½@żĘżŲżŁż┐ĪŻĖĄżŽQimondaż╬╣®Šņż└ż├ż┐ż¼ĪóżĮżņż“āAżżŲDż├ż┐ĪŻż│ż│ż╦Ų»ż»╝ęµ^┐¶żŽ2000ć@ĪóŲŌ50%ż¼Ė“ü÷öUŠäē»ż└ż╚żĘżŲżżżļĪŻ┐▐1ż╬║Ė├╝ż╬Ę·▓░ż¼300mmźķźżź¾żŪĪóīÜż╬įÆż─(īÜ├╝żŽŠ«żĄżż)ż¼200mmźķźżź¾żŪżóżļĪŻ300mmź”ź¦Ī╝źŽżŪÖ┌ŠÅżĄżņżļ×æē俎Ī󟬟¾°BŃ^ż¼─ŃżżCoolMOSż╚Ō}żążņżļāeĘ┐źčź’Ī╝MOSFETżõIGBTż╩ż╔ż╬×æēäĪŻCoolMOSżŽ┬č░Ąż¼600V░╩æųż╚╣Ōżżż╩ż¼żķź¬ź¾°BŃ^ż¼“£═Ķż╬MOSFETż╬1/4Ī┴1/5ż╚Š«żĄż╩źčź’Ī╝-MOSFETĪŻź│ź¾źįźÕĪ╝ź┐ż╬┼┼Ė╗żõź╣ź▐ź█żõĘ╚┬ėĄĪ▀_ż╬┼┼Ė╗ż╦żŌ╗╚ż”ĪŻIGBTżŽĪó┼┼╬«ż¼┐¶Ø▓A░╩æųż╚Įj(lu©░)żŁż╩┼┼Ė╗żõźżź¾źąĪ╝ź┐ż╩ż╔ż╦╗╚ż’żņĪó║ŲÖ┌▓─ē”ź©ź═źļź«Ī╝żõ┼┼ĄżśOŲ░┘ZĪó╣®Č╚├ōż╬źŌĪ╝ź┐ź╔źķźżźųż╩ż╔ż╦┴╚ż▀╣■ż▐żņżļĪŻ

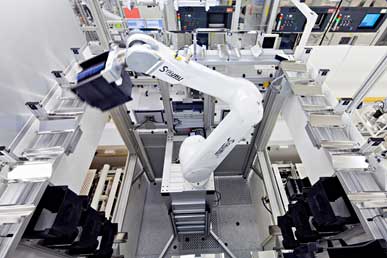
┐▐2ĪĪ200mmż╬┤░µ£śOŲ░▓Įźķźżź¾ż“┴÷żļ╚┬┴„źĘź╣źŲźÓĪĪĮąųZĪ¦Infineon Technologies
200mmż╬źķźżź¾ż╦żŽż█ż╚ż¾ż╔┐═ż¼żżż╩żżĪŻźßź╚źĒźĒźĖĪ╝╝Ŗ▒Rż╬ź┘źżżõźŌź╦ź┐Ī╝źĘź╣źŲźÓż╬Øiż╦┐¶┐═żżżļµć┼┘żŪĪó╚┬┴„ÅUż½żķź”ź¦Ī╝źŽż╬ĮążĘŲ■żņĪóäóÅøż½żķäóÅøżžż╬╚┬┴„ż╦żŽ┐═Š}ż“µ£ż»▓żĄż╩żżĪŻż│ż╬źĘź╣źŲźÓżŽInfineonż¼Ų╚śOż╦Š}ż“▓├ż©╝┬ĖĮżĘż┐żŌż╬ż└ż╚żżż”ĪŻź”ź¦Ī╝źŽżŽź¬Ī╝źūź¾ź½ź╗ź├ź╚ż╦25ĮŚŲ■żņżķżņĪóÜW░µż╬śOŲ░╚┬┴„źĘź╣źŲźÓĪ╩┐▐2Ī╦ż╦║▄ż╗żķżņĪóäóÅøż½żķäóÅøżžż╚öĪŲ░ż╣żļĪŻµ£żŲż╬ź½ź╗ź├ź╚ż╦żŽRFIDż¼┼ļ║▄żĄżņĪóMCSĪ╩Material Control SystemĪ╦ż¼żĮż╬IDż“Ų╔ż▀ŲDżĻ╝Īż╬║ŅČ╚╣®µćżžż╚╚┬┴„ż╣żļĪŻ╚┬┴„ź│ź¾ź┘źóżŽźĻź╦źóźŌĪ╝ź┐Ī╝öĄ(sh©┤)╝░żŪ╚┬┴„Ž®ż╬╩╔ż╦└▀ż▒żķżņż┐╝¦└ą(┐▐2ż╬śĘżżŗ╩¼)żŪŲ░ż»ĪŻż│ż╬╚┬┴„źĘź╣źŲźÓżŽõø┼─ĄĪ│Żż¼║Ņż├ż┐źŌź╬żŪĪóInfineonż╦żĶżļż╚ż│ż╬╚┬┴„źĘź╣źŲźÓż╬║Ņ×æż“┐¶╝ęż╦░══Ļż╣żļż╚Īó¾Hż»ż¼żĘżĻ╣■ż▀żĘĪóõø┼─ĄĪ│Żż¼─®└’ż╣żļż╚Ė└ż├żŲż»żņżŲĮą═Ķż┐żŌż╬ż└ż╚żżż”ĪŻ╚┬┴„ź│ź¾ź┘źóźĘź╣źŲźÓż╬µ£─╣żŽ5kmż╦żŌĄ┌żųż╚żżż”ĪŻ
żĄżŲĪóź½ź╗ź├ź╚ż¼äóÅøż╬ŖZż»ż╦┼■ŠÆż╣żļż╚ĪóÜW░µż½żķź©źņź┘Ī╝ź┐ż╦║▄ż╗żķżņĪóź½ź╗ź├ź╚ż¼ĮĖż▐żļź½ź╗ź├ź╚ź╣źŲĪ╝źĘźńź¾ż╦┼■ŠÆż╣żļĪŻźĒź▄ź├ź╚źóĪ╝źÓż¼ź½ź╗ź├ź╚ż“Ęeż┴æųż▓Īó╝Īż╬äóÅøż╦╣įż»Øiż╦ź½ź╗ź├ź╚ż“╩┬ż┘ü÷ż©żļ (┐▐3)ĪŻż│ż│żŪżŌ╠Ą┐═ż└ĪŻ╩┬ż┘ü÷ż©żķżņż┐ź½ź╗ź├ź╚ż“║Ż┼┘żŽĪóźĒĪ╝źŪźŻź¾ź░źĒź▄ź├ź╚ĪųHEROĄ\Īū(┐▐4)ż¼ź½ź╗ź├ź╚ż“£pż▒ŲDżĻĪóäóÅøż╬Øiż╦ź╗ź├ź╚ż╣żļĪŻż│ż╬źĒź▄ź├ź╚żŽņoż╦Øażķżņż┐źņĪ╝źļż“Ū¦╝▒ĪóżĮżņż╦▐pż├żŲŲ░ż»ĪŻźņĪ╝źļż╬Øiż╦░█رĪó╬Ńż©żą┐═┤ųż╬’Bż╩ż╔ż¼żóżļż╚║t║┬ż╦źĒź▄ź├ź╚żŽ─õ┘Vż╣żļĪŻ’Bż“żĶż▒żļż╚źĒź▄ź├ź╚żŽ║ŲżėŲ░żŁĮąż╣ĪŻ
┐▐3ĪĪź”ź¦Ī╝źŽź╣źŲĪ╝źĘźńź¾ż╬źĒź▄ź├ź╚źóĪ╝źÓż¼ź½ź╗ź├ź╚ż╬╣įżŁ└Ķż“║Ų─┤┼Dż╣żļĪĪĮąųZĪ¦Infineon Technologies

┐▐4ĪĪäóÅøż╬ØiżŪź½ź╗ź├ź╚ż“ĮążĘŲ■żņż╣żļźĒź▄ź├ź╚ĪĪĮąųZĪ¦Infineon Technologies
ż│ż╬ź»źĻĪ╝ź¾źļĪ╝źÓżŪżŽĪó┐═żŽź½ź╗ź├ź╚ż╬ėXČĘż“źŌź╦ź┐Ī╝żŪĖ½ż┐żĻĪóöUĖµ├ōż╬ĄĪ│Żż“źŌź╦ź┐Ī╝żĘż┐żĻżĘżŲżżżļż└ż▒żŪżóżļĪŻź”ź¦Ī╝źŽżŽ1╩¼┤ųż╦7╦³ĮŚż¼Ų░żżżŲżżżļĪŻ╗■ż╦żŽĪóź½ź╗ź├ź╚ż¼┐¶╗■┤ų┬įż┴Īó┬Šż╬ź½ź╗ź├ź╚ż╚Ų▒╗■ż╦ĮĶ═²żĄżņżļż│ż╚żŌżóżļż╚żżż”ĪŻż┐ż└żĘĪóŠåż«Īóżżż’żµżļØŖŠåēäż╬Šņ╣ńżŽ┐═ż¼▒┐żųż│ż╚żŌżóżļż╚żĘżŲżżżļĪŻ
ź»źĻĪ╝ź¾źļĪ╝źÓżŽź»źķź╣1ż╬µ£ĀCź└ź”ź¾źšźĒĪ╝öĄ(sh©┤)╝░żŪĪó┤╦▄┼¬ż╦┐═Š}ż“▓żĄż╩żż└▀╝Ŗż╦żĘżŲżżżļĪŻź»źĻĪ╝ź¾źļĪ╝źÓż╬╝Š┼┘żõča┼┘ĪóĄż░ĄĪóź└ź╣ź╚┐¶ż╩ż╔ż╬▒R─ĻżŽ▐k─Ļż╬ŠņĮĻżŪżŽż╩ż»Ī󿥿▐żČż▐ż╩ŠņĮĻżŪ╣įż”ĪŻżĮż╬ż┐żßż╬źĒź▄ź├ź╚żŌżóżļĪ╩┐▐5)ĪŻż│ż╬źĒź▄ź├ź╚ĪųAMORĄ\ĪūżŽźčĪ╝źŲźŻź»źļż╬źĄźżź║żŌ▒R─Ļż╣żļĪŻų`ż╬ŗ╩¼ż¼╗■Ī╣Ų░żżżŲĪó┐┤ż╬¤NżĘż╦ż╩żļĪŻ▒R─Ļ±T▓╠ż╦ż¬żżżŲĪó╠õ¼öż¼żóżņżą║t║┬ż╦ē¶żķż╗żļĪŻ

┐▐5ĪĪź»źĻĪ╝ź¾źļĪ╝źÓż╬ėX▌åż“źŌź╦ź┐Ī╝ż╣żļźĒź▄ź├ź╚ĪĪĮąųZĪ¦Infineon Technologies
300mmźķźżź¾żŽĪó┤╦▄┼¬ż╦żŽź▀ź╦ź©ź¾źąźżźóźĒź¾źßź¾ź╚źĘź╣źŲźÓżŪżóżĻĪó┬Š╝ęż╬ź»źĻĪ╝ź¾źļĪ╝źÓż╚żĮżņż█ż╔Įj(lu©░)żŁż╩░ŃżżżŽż╩żżż╚żĘżŲżżżļĪŻź»źĻĪ╝ź¾źļĪ╝źÓż╬╦{Š¶┼┘żŽź»źķź╣1000żŪżóżĻĪó╠®╩─żĘż┐FOUPź½ź╗ź├ź╚ż“ŠW(w©Żng)├ōż╣żļĪŻż│ż│żŪżŌõø┼─ĄĪ│Żż╬╚┬┴„źĘź╣źŲźÓż“╗╚ż├żŲżżżļĪŻż│ż╬źķźżź¾żŪżŽ┐═ż¼ŖZż»ż└ż╚äóÅøż½żķäóÅøż╦▒┐ż┘żļżĶż”ż╦ż╩ż├żŲż¬żĻĪóźĒź▄ź├ź╚żŽżĮżņż█ż╔żżż╩żżĪŻ300mmź”ź¦Ī╝źŽż“25ĮŚ╦■║▄żĘż┐FOUPż╬─_żĄżŽ8.5kgżŪżóżĻĪó┐═┤ųż¼▒┐ż┘żļ─_╬╠żŪżŽżóżļĪŻ300mmźķźżź¾żŽSEMIź╣ź┐ź¾ź└Ī╝ź╔ż╦▐pż├żŲ║ŅżķżņżŲżżżļĪŻ
Infineonż╬źčź’Ī╝╚ŠŲ│öüź”ź¦Ī╝źŽżŽĪó║ŪĖÕż╬╣®µćżŪ╬óĀCĖ”╦߿ʿŲ40µmµć┼┘ż╦Ū÷ż»║’żļĪŻInfineonż╬300mmźķźżź¾żŽĪóź¬Ī╝ź╣ź╚źĻźóż╬źšźŻźķźŽż╦żŌżóżĻĪóżĮż│żŽżÓżĘżĒ│½╚»Ą“┼└ż╚ż╩ż├żŲżżżļĪŻ300mmż╬źķźżź¾ż╬╣Į├█żŽ2008ŃQż╦źšźŻźķźŽżŪĖĪŲżż“żŽżĖżßĪóźčźżźĒź├ź╚źķźżź¾ż“╣Į├█żĘż┐ĪŻź╔źņź╣źŪź¾żŪżŽĪó2011ŃQż╦300mm╬╠ŠÅźķźżź¾ż“┤░└«żĄż╗ż┐ĪŻ2014/2015ŃQ┼┘ż╦żŌÖ┌ŠÅē”╬üż“æųż▓żļż┐żßż╦300mmźķźżź¾ż╚IGBTż╦─_┼└┼Ļ½@ż╣żļĪŻ