┼ņėøĪóŠ}ż╬żężķźĄźżź║ż╬LiDARżŪ300mż▐żŪĖĪĮą
┼ņėøżŽśOŲ░┘Zż╬╝■░Ž360┼┘ż“źżźßĪ╝źĖź¾ź░ż╣żļLiDARĪ╩Laser Imaging Detection and RangingĪ╦ż╬Š«Ę┐▓Įż“┐╩żßżŲżżżļż¼Īóż│ż╬ż█ż╔Š}ż╬żężķźĄźżź║ż╬Š«Ę┐LiDARż“│½╚»żĘż┐Ī╩┐▐1Ī╦ĪŻų`ż╦ŠŃ│▓ż“═┐ż©ż╩żżĮą╬üæä│╩żŪżóżļĪųźóźżź╗Ī╝źšĪūż╦ØŹĄ“żĘż╩ż¼żķ300źßĪ╝ź╚źļż▐żŪż╬رöüż“ĖĪĮążŪżŁżļĪŻ┼ņėøżŽżĄżķż╩żļŠ«Ę┐▓Įż“┐╩żßĪó2023ŃQ┼┘ż╬╝┬├ō▓Įż“ų`╗žżĘżŲżżżļĪŻ
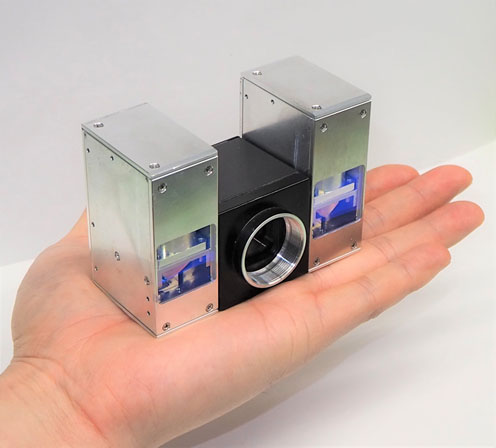
┐▐1ĪĪŠ}ż╬żężķźĄźżź║żŪ300mż▐żŪĖĪĮążŪżŁżļLiDARĪĪĮąųZĪ¦┼ņėø
LiDARżŽśOŲ░▒┐┼Šż╦ØŁ═ūż╩źżźßĪ╝źĖź¾ź░źŪźąźżź╣żŪżóżļż¼Īóź░Ī╝ź░źļź½Ī╝ż╬źļĪ╝źšæųż╦żŌ└▀ÅøżĄżņżŲżżżļäóÅøżŪĪóöv┼ŠżĘż╩ż¼żķ╝■░Ž360┼┘ż╬źżźßĪ╝źĖź¾ź░ż“╣įż”ĪŻ▓─£åĖ„ż╬ź½źßźķż└ż╚Ū╗šäżõ┐ß└ŃżŪżŽżĶż»Ė½ż©ż╩żżż┐żßĖĪĮążŪżŁż╩żżż¼ĪóLiDARżŽśĘ│░└■ż“╚»╝ożĘżŲرöüż╦╚┐╝oż╣żļż▐żŪż╬╗■┤ųż½żķرöüż╚ż╬š{▀`ż“▒R─ĻżĘĪóȧ┤ųż“ź╣źŁźŃź¾żĘż╩ż¼żķźżźßĪ╝źĖż“ķWż»ż│ż╚ż¼żŪżŁżļĪŻżżż’żµżļToFĪ╩Time of FlightĪ╦ź╗ź¾źĄż╬▐k¹|żŪżóżļĪŻīŽ┤ųżŪżŌĖĪĮążŪżŁżļż┐żßĪóź½źßźķżĶżĻżŌżĶż»Ė½ż©żļĪŻ
żĘż½żĘLiDARżŽĪó1±ś┐¶Ø▓╦³▀ģĪ┴┐¶╦³▀ģż╚╣Ō▓┴ż└ĪŻŠ«Ę┐Ę┌╬╠▓ĮżŪ─Ń▓┴│╩ż╦żĘż╩ż▒żņżąśOŲ░┘Zż╦żŽ┼ļ║▄żŪżŁż╩żżĪŻź░Ī╝ź░źļź½Ī╝ż╬żĶż”ż╦źļĪ╝źšæųżŪövżĘż╩ż¼żķ┴÷żļż╬żŽźŪźČźżź¾æųĪóżóżļżżżŽČ§Ąż°BŃ^æųżŪżŌ╬╔ż»ż╩żżĪŻżŌż├ż╚Š«Ę┐Ę┌╬╠żŪŲŌŗż╬ŗēäżŌŠ«Ę┐ż╦żĘż╩ż▒żņżą─Ń▓┴│╩▓Įż╦±Tżė¤²ż½ż╩żżĪŻż▐ż┐Īó▒■├ōĀCżŪżŽĪóśOŲ░┘Zż╦┼ļ║▄ż╣żļż╬żŪżŽż╩ż»Īó╬Ńż©żą╣ŌÅ]╠OŽ®Ŗõż╦└▀ÅøżĘżŲ─╠╣įż╣żļśOŲ░┘Zż╬±ś┐¶ż“┐¶ż©żļżĶż”ż╩źżź¾źšźķ┤Ų£åżõź╗źŁźÕźĻźŲźŻż╬├ō²ŗż└ż╚ĪóŠ}ż╬żężķźĄźżź║żŪżŌ╗╚ż©żļĪŻ
║Żövż╬LiDARżŽĪóśĘ│░└■ż“╚»╝oż╣żļ┼ĻĖ„▀_ż“2±ś├ōżżżŲ300źßĪ╝ź╚źļż▐żŪŲŽż»╗Ņ║ŅēäżŪĪó1±śżŪżŽ224źßĪ╝ź╚źļżĘż½ŲŽż½ż╩żżĪŻ2±ś╣ń└«ż╣żļż╚═²ébæųĪó√2Ū▄ż╦ż╩żļż╚żĘżŲ║Żövż╬300źßĪ╝ź╚źļż“├Ż└«żĘż┐ĪŻ┼÷Įķż╬ź░Ī╝ź░źļź½Ī╝ż╦┼ļ║▄żĄżņż┐Velodyne╝ęż╬LiDARżŽźņĪ╝źČĪ╝ż╚£pĖ„┴Ū╗ęż“źóźņźżėXż╦Įj╬╠ż╦┼ļ║▄żĘĄĪ│Ż┼¬ż╦360┼┘öv┼ŠżĄż╗żŲ楿“įużŲżżż┐ż¼Ī󟥟żź║żŽŠ«Ę┐ż╦żŪżŁż╩ż½ż├ż┐ĪŻżĘż½żŌ┼÷Įķż╬▓┴│╩żŽ100╦³▀ģżŌżĘż┐ĪŻ
żĮż│żŪź▌źĻź┤ź¾ź▀źķĪ╝żŪźņĪ╝źČĪ╝Ė„ż“360öv┼ŠżĄż╗żļż╚Ų▒╗■ż╦æų▓╝ż╦żŌ╣Łż▓żļżĶż”ż╦żĘżŲźĄźżź║ź└ź”ź¾ż“┐▐ż├ż┐ż¼ĪóżĮżņżŪżŌŠ«Ę┐ż╦żŽ▒¾żżĪŻ║ŪĮ¬┼¬ż╩Š«Ę┐▓Įż╦żŽżõżŽżĻMEMSż“╗╚ż├ż┐ź▀źķĪ╝öĄ╝░żŪĖ„ż“Č╩ż▓Ī󿥿ķż╦öv┼ŠżĄż╗żļØŁ═ūż¼żóżļĪŻżóżļżżżŽĪóVCSELĪ╩ĀC╚»Ė„źņĪ╝źČĪ╝Ī╦Č\ĮčżŪźņĪ╝źČĪ╝źŪźąźżź╣ż“¾H┐¶1ź┴ź├źūż╦ĮĖ└čżĘżŲȧ┤ųż“ź╣źŁźŃź¾ż╣żļż╚żżż”öĄ╦ĪżŌżóżļĪŻżżż’żą┤░µ£╔wöü▓Įż╬LiDARżŪżóżļĪŻ
┼ņėøż¼║Żöv║╬ż├ż┐ż╬żŽź▌źĻź┤ź¾ź▀źķĪ╝ż“öv┼ŠżĄż╗ż╩ż¼żķĪóĖ„Ž®ż“3╝ĪĖĄ┼¬ż╦Č╩ż▓żŲŠ«Ę┐▓Įż“├Ż└«ż╣żļöĄ╦Īż└Ī╩┐▐2Ī╦ĪŻż│żņż╦żĶżĻ“£═Ķż╬öü└č280cm3ż½żķ71cm3żžż╚Īó╠¾1/4ż╦Š«Ę┐▓ĮżĘż┐ĪŻ
┐▐2ĪĪ┼ņėøż¼│½╚»żĘż┐LiDARżŽĖ„Ž®ż╬╣®╔ūżŪŠ«Ę┐ż╦ĪĪĮąųZĪ¦┼ņėø
żĄżķż╦źŌĪ╝ź┐öUĖµövŽ®ż“┼ļ║▄żĘż┐źūźĻź¾ź╚övŽ®┤łż╬ĀC└čż““£═Ķż╬25cm2ż½żķ10cm2żžż╚║’žōżĘż┐ĪŻżĮż╬ż┐żßż╦╣ŌĮĖ└čICż“╗╚ż├ż┐ż╚żĘżŲżżżļĪŻż▐ż┐2±ś1┴╚żŪ300źßĪ╝ź╚źļż▐żŪĖĪĮążŪżŁżļżĶż”ż╦żĘż┐ż┐żßĪóź▌źĻź┤ź¾ź▀źķĪ╝ż“öv┼ŠżĄż╗żļ2±śż╬źŌĪ╝ź┐ż╬öv┼Š│čĪóöv┼ŠÅ]┼┘Īó┼┼╬«ż╬3─_źļĪ╝źūż╦Ų▒┤³ż“ŲDżĻĪóźņĪ╝źČĪ╝źėĪ╝źÓż“0.02┼┘░╩ŲŌż╬╗@┼┘żŪ─_ż═╣ńż╗żļż│ż╚ż╦└«Ė∙żĘż┐ĪŻ╚»╝oĖ„ż╬źŪźąźżź╣ż“2±śż╦╩¼ż▒żŲżŌµ£öüż╬źĘź╣źŲźÓźĄźżź║żŽĪó206cm3Īóż╚║“ŃQż╬╗Ņ║ŅēäżĶżĻżŌ40%║’žōżĄżņż┐ż╚żżż”ĪŻ
╗▓╣═½@╬┴
1. Īų┼ņėøĪóŠ}ż╬żężķźĄźżź║ż╬LiDARż“│½╚»ĪŻ└ż─cź╚ź├źūź»źķź╣ż╬▓Ķ䮿Ū└ż─c║Ū─╣╝Ŗ▒Rš{▀`300mż“├Ż└«ĪūĪó┼ņėø (2022/03/18)