┐Õ├µ─╠┐«ż╦×E┐¦LEDżõźņĪ╝źČĪ╝ż¼╔ŌæųĪóLiDARżŪķLöf├ŽĘ┴ż“śOŲ░╝Ŗ▒Rż╦
×E┐¦Ė„ż“╗╚ż├ż┐─╠┐«ż¼┐Õ├µżŪ┴T│░ż╚╗╚ż©żĮż”ż└ĪŻ┐Õ├µż╬Ė„─╠┐«żŽŠ├õJ┼┼╬üż╚źŪĪ╝ź┐źņĪ╝ź╚╝ĪŗīżŪ1Ī┴100źßĪ╝ź╚źļżŌ╚¶żąż╗żļżķżĘżżĪŻż│ż”żżż├ż┐╚»„[ż½żķÖ┌ż▐żņż┐ALANź│ź¾źĮĪ╝źĘźóźÓż¼2018ŃQ6ĘŅż╦└▀╬®żĄżņż┐ż¼Īó▓±µ^┤ļČ╚ż╬ź╚źĻź▐źŲźŻź╣╝ęż¼ż│ż╬ż█ż╔┐Õ├µLiDARż╬│½╚»ż“╗Žżßż┐ĪŻ
ż│żņż▐żŪķL├µżŪż╬─╠┐«Š}├╩ż╚żĘżŲżŽ«Ć▓╗āSĪ╩źĮź╩Ī╝Ī╦ż»żķżżżĘż½ż╩ż½ż├ż┐ĪŻ┼┼╝¦āSżŽ┐Õ├µżŪĄ█╝²żĄżņżļż½żķż└ĪŻż▐ż┐«Ć▓╗āSżŽ─╠┐«ż╬╝■āS┐¶┬ė░Ķż¼Č╣ż»Īó┼┴┴„═Ų╬╠ż¼Š«żĄżżĪóż▐ż┐ęÆūāż¼ĮjżŁż»║t╗■└Łż¼žMżĘżżĪóż╩ż╔ż╬╠õ¼öż¼żóż├ż┐ĪŻķL═╬Ė”ē|│½╚»ĄĪ╣Įż╬Ė”ē|żŪżŽ900mż╬š{▀`ż“80kbpsżŪ─╠┐«żŪżŁż┐µć┼┘ż╦é╬ż▐ż├żŲżżż┐ĪŻ
żĮż│żŪĪó«Ć▓╗āSżŪżŽż╩ż»Ė„ż“╗╚ż”─╠┐«ż“ĖĪŲżżĘżŲż▀żļż╚Īó┐Õ├µżŪżŽ×E┐¦ż¼║ŪżŌ╬╔ż»─╠żļż┐żßĪó×E┐¦LEDż“─╠┐«ż╦╗╚ż├żŲż▀żĶż”ż╚żĘżŲĪóż│ż╬ź│ź¾źĮĪ╝źĘźóźÓż¼╬®ż┴æųż¼ż├ż┐ĪŻ┐╝ķLż╩żķ300mĪó└§żżķLżŪżŌ120mż▐żŪżŽŲŽż»ż│ż╚ż“╝┬Š┌żĘżŲżżżļż╚żżż”ĪŻ
ALANĪ╩Aqua Local Area NetworkĪ╦ź│ź¾źĮĪ╝źĘźóźÓż╦żŽĪóķL═╬│½╚»ż“┴└ż├żŲķL═╬Ė”ē|│½╚»ĄĪ╣Įż╦▓├ż©ĪóŠÅČ╚Č\Įč┴Ē╣ńĖ”ē|ĮĻżõŠ╩¾─╠┐«Ė”ē|ĄĪ╣ĮĪóKDDI┴Ē╣ńĖ”ē|ĮĻĪóź┘ź¾ź┴źŃĪ╝ż╬ź╚źĻź▐źŲźŻź╣Ī󿥿ķż╦╗h±ä╣®Č╚Įj│žżõ┼ņķLĮj│žĪó┼ņ»B╣®Č╚Įj│žĪó┼ņĒ×Įj│žĪóć@ŠļĮj│žĪóæč═³Įj│žĪó┴ß░┼─Įj│žżŌ▓├ż’żļĪŻż│żņżķż╬┴Ž╬®źßź¾źąĪ╝ż╦▓├ż©Īó└▀╬®ĖÕż╦ģ╬═█═Č┼┼żõ┘pŠŠź█ź╚ź╦ź»ź╣Īó┼┼ĄżČĮČ╚ĪóźŌźąźżźļźŲź»ź╬ż╩ż╔żŌ╗▓▓├żĘż┐ĪŻ
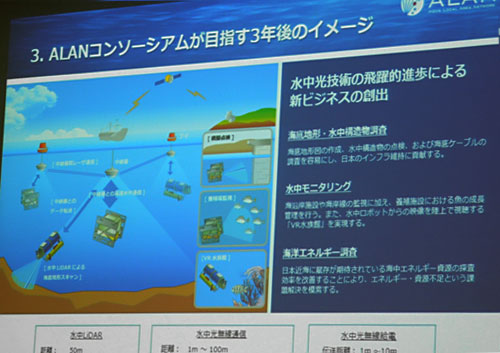
┐▐1ĪĪ×E┐¦LEDżõźņĪ╝źČĪ╝ż“ŠW├ōż╣żļķL├µ─╠┐«ż╬├ō²ŗĪĪĮąųZĪ¦ALANź│ź¾źĮĪ╝źĘźóźÓ
ķL├µżŪż╬▒■├ōĪ╩┐▐1Ī╦ż╚żĘżŲżŽĪó┐Õ├µLiDARż¼║ŪĮķż╬▒■├ōż╚ż╩żļĪŻż│żņżŽķLöfż╬├ŽĘ┴╝Ŗ▒RżõĪóČČ£ņżõ╣┴Žč└▀×óż╬┐Õ├µŗ╩¼ż╬ĖĪØhĪóź└źÓ┼└ĖĪĪó├Ž┐╠żõģ╚āSĖÕż╬─┤ØhĪóķL├µż╬╔Ō═╚رż╚ż╩żļźūźķź╣ź┴ź├ź»ż┤ż▀ż╬ĖĪĮąĪóż╩ż╔ż╬─┤Øhż╦╗╚ż’żņżĮż”ż└ĪŻż▐ż┐ĪóķL├µĪ”ķLöfż╬══╗ęż“źĻźóźļź┐źżźÓżŪź½źßźķż╬▒ŪćĄ┼┴┴„ż╚żżż”▒■├ōżŌżóżĻżĮż”ż└ĪŻķLöfż╬╗Ż▒Ųż╦╣Ō╗@║┘ź½źßźķż“╗╚ż”ż╩żķźŪĪ╝ź┐╬╠żŽ¾Hż»ż╩żļż┐żßĪóĖ„ż╦żĶżļź’źżźõźņź╣─╠┐«ż╩żķ┼┴┴„żŪżŁżĮż”ż└ĪŻ
║ŻövĪóź╚źĻź▐źŲźŻź╣╝ęż¼│½╚»ż╣żļ┐Õ├µLiDARżŽĪó╝┬żŽ2ęÄĄĪż╦┼÷ż┐żļĪŻ1ęÄĄĪĪ╩┐▐2Ī╦żŽROVĪ╩Remotely Operated VehicleĪ╦ż╬æųż╦LiDARż“└▀ÅøżĘżŲżżżļĪŻż│ż╬LiDARżŽĪóĖ„ż“─Š└■┼¬ż╦╚┐╝ożĘżŲ╚┐╝oż╣żļĖ„ż“£pż▒żŲżżż┐ż└ż▒ż╦ż╣ż«ż║Īó├ŽĘ┴ż“ķWż»ż┐żßż╦żŽĄĪ│Ż┼¬ż╦Ų░ż½żĘż╩ż¼żķ┴÷ØhżĘż╩ż▒żņżąż╩żķż╩ż½ż├ż┐ĪŻ║Żöv╗Ņ║Ņż╣żļ2ęÄĄĪżŽĪóĖ„źėĪ╝źÓż“┐Čżļź╣źŁźŃź╩Ī╝ĄĪ╣Įż“┼ļ║▄ż╣żļĪŻŃQŲŌż╦ķL├µźĒź▄ź├ź╚żŌ┤▐żßĪóLiDARż╬╝┬Š┌╝┬┘xż“╣įż”═Į─ĻżŪĪó19ŃQ┼┘Ī┴21ŃQ┼┘ż╦┼ŽżĻ│½╚»ż“┐╩żßĪóż│ż╬3ŃQ┤ųżŪ╝┬├ō▓Įż╬źßź╔ż“¤²ż▒żŲżżż»Īóż╚ź╚źĻź▐źŲźŻź╣╝ę┬Õ╔ĮŲD─∙╠“╝ę─╣ż╬ćŖ┼─Čd╗╦Ģ■żŽ┴T═▀┼¬ż╦ĖņżļĪŻ
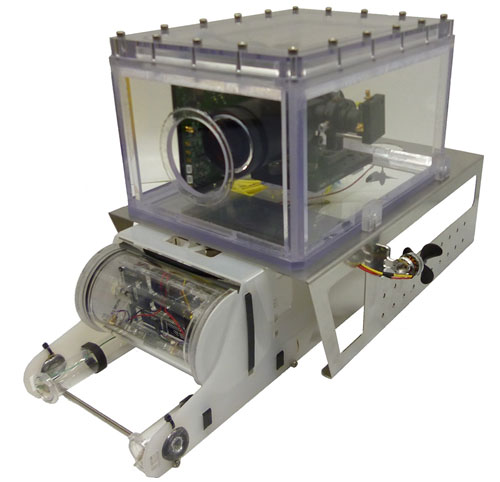
┐▐2ĪĪ╗Ņ║ŅżĘż┐ROV-LiDARż╬1ęÄĄĪĪĪĮąųZĪ¦ź╚źĻź▐źŲźŻź╣
▌xŠņż╚żĘżŲżŽĪóż▐ż║╝ę▓±źżź¾źšźķżŪżóżļąQ└Ņżõ╣┴Žčż╩ż╔ż╬ČČ£ņż╬╩▌╝ķĖĪØhż“„[─ĻżĘżŲż¬żĻĪóŲ³╦▄╣±ŲŌż╦żŽĪóČČ£ņżŽ║ŻĖÕ10ŃQ░╩ŲŌż╦Ę·├█ĖÕ50ŃQ░╩æųĘąāįż╣żļżŌż╬ż¼żóżļż┐żßĪó╦─Įjż╩▌xŠņż╦ż╩żĻż”żļĪŻżĄżķż╦┐Õ├µźĒź▄ź├ź╚ż“┴╚ż▀╣ńż’ż╗żļż│ż╚żŪĪóż╩żĻŠ}ż¼Š»ż╩ż»ż╩ż├żŲżŁżŲżżżļź└źżźąĪ╝ż╬┬Õż’żĻż“ē»żßżļż│ż╚ż╬ܦ▐qż╦żŌ┤³┬įżĘżŲżżżļĪŻ